Gemeinsamer Zwischenkreis - Mehrfachversorgung, mehrere interne Ballastmodule, schwebender Zwischenkreis |
Hier ein Beispiel für eine typische 3-achsige Portalroboteranwendung in einer gemeinsamen Zwischenkreis-Konfiguration mit folgenden Merkmalen:
|
||
|
Leitungsgleichrichter Leistungsmodul mit
ungesteuertem Zwischenkreis Umrichtermodul Internes Ballastmodul Gemeinsame Zwischenkreisleistung für alle Achsen |
|
|
Leitungsgleichrichter Leistungsmodul mit ungesteuertem
Zwischenkreis Umrichtermodul Internes Ballastmodul Gemeinsame Zwischenkreisleistung für alle Achsen |
|
|
Leitungsgleichrichter Leistungsmodul mit ungesteuertem
Zwischenkreis Umrichtermodul Internes Ballastmodul Gemeinsame Zwischenkreisleistung für alle Achsen |
|
|
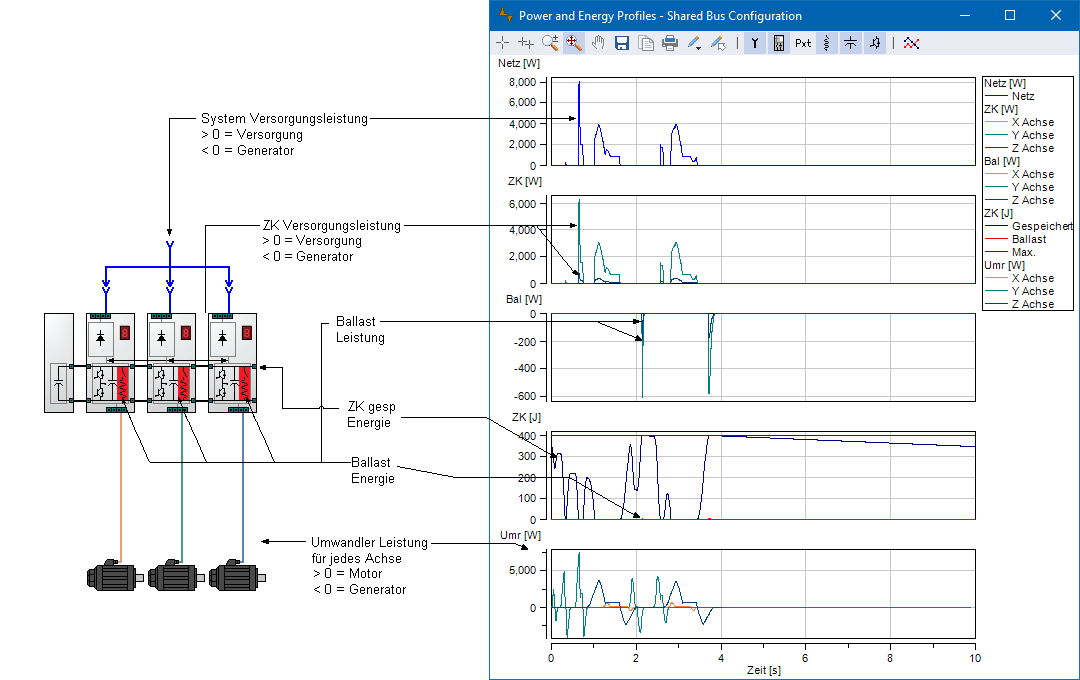
Gesamtleistung, die das Servosystem entnimmt oder für die
Versorgungsverbindung generiert |
|
Versorgungsleistung an den Zwischenkreis vom Einspeiseabschnitt
eines Antriebs Bei mehreren Einspeisemodulen kann der Anwender optional angeben, ob die gesamte Einspeiseleistung:
|
|
Ballastleistung verteilt an jedes Ballastmodul im Zwischenkreis Bei mehreren Ballastmodulen kann der Anwender optional angeben, ob die gesamte Ballastleistung:
|
|
An beliebigen Punkten im Zyklus gespeicherte
Zwischenkreisenergie |
|
Gesamte, von allen Ballastmodulen im System umgewandelte
Energie. Wird angezeigt, um darzulegen, wie viel Energie im
Verhältnis zur Gesamtenergiekapazität des Zwischenkreises
umgewandelt wird. |
|
Umrichter Leistung an den und vom Motor |